An Extensible Platform for Measurement and Modification of Muscle Engagement During Upper-Limb Robot-Facilitated Rehabilitation
 Motor rehabilitation platform enabling detailed measurement of muscle engagement during 6D trajectory tracking tasks.
Motor rehabilitation platform enabling detailed measurement of muscle engagement during 6D trajectory tracking tasks.Abstract
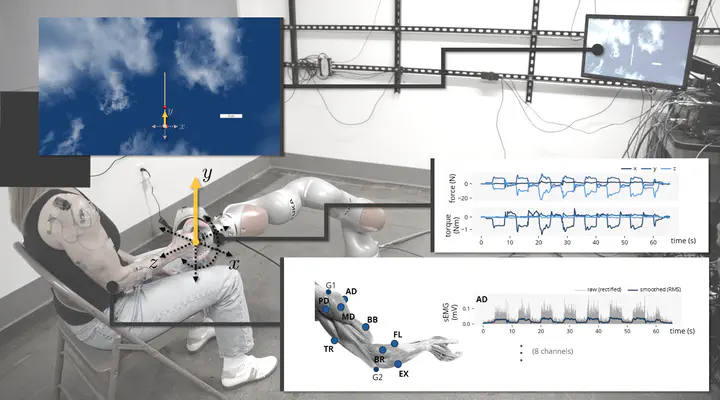
Populations with upper-limb neuromotor disabilities could greatly benefit from robot-mediated therapy, but the heterogeneity of these disorders, combined with unresolved questions around neuroplasticity mechanisms, hinders the standardized prescription of effective rehabilitation tasks and corresponding robot behaviors. Building on consensus that active neuromuscular engagement is vital for therapy, we introduce a novel, extensible rehabilitation robot platform to directly measure (and, ultimately, modify) user engagement at the muscle level. The system integrates surface electromyography to monitor muscle activation patterns during isometric tracking tasks in all 6 dimensions of hand exertion — beyond the planar constraints of most systems. Usability testing with 13 healthy and 2 post-stroke participants demonstrates the system’s utility in analyzing motor behavior across varying poses, trajectories, and impairment levels. Preliminary results indicate that pose and task selection significantly impact activation patterns, highlighting the rehabilitative potential of systems that support motion along all axes and at multiple user poses and guiding our own planned augmentations of the platform (personalized controllers, additional sensing, etc.). To facilitate broader research into muscle activation–force relationships and address the scarcity of open-source upper-limb motor behavior data, we have released all collected data and analysis code as part of the OpenRobotRehab project on SimTK (simtk.org/projects/openrobotrehab) alongside this publication.